 USA
USA
 USA
USA
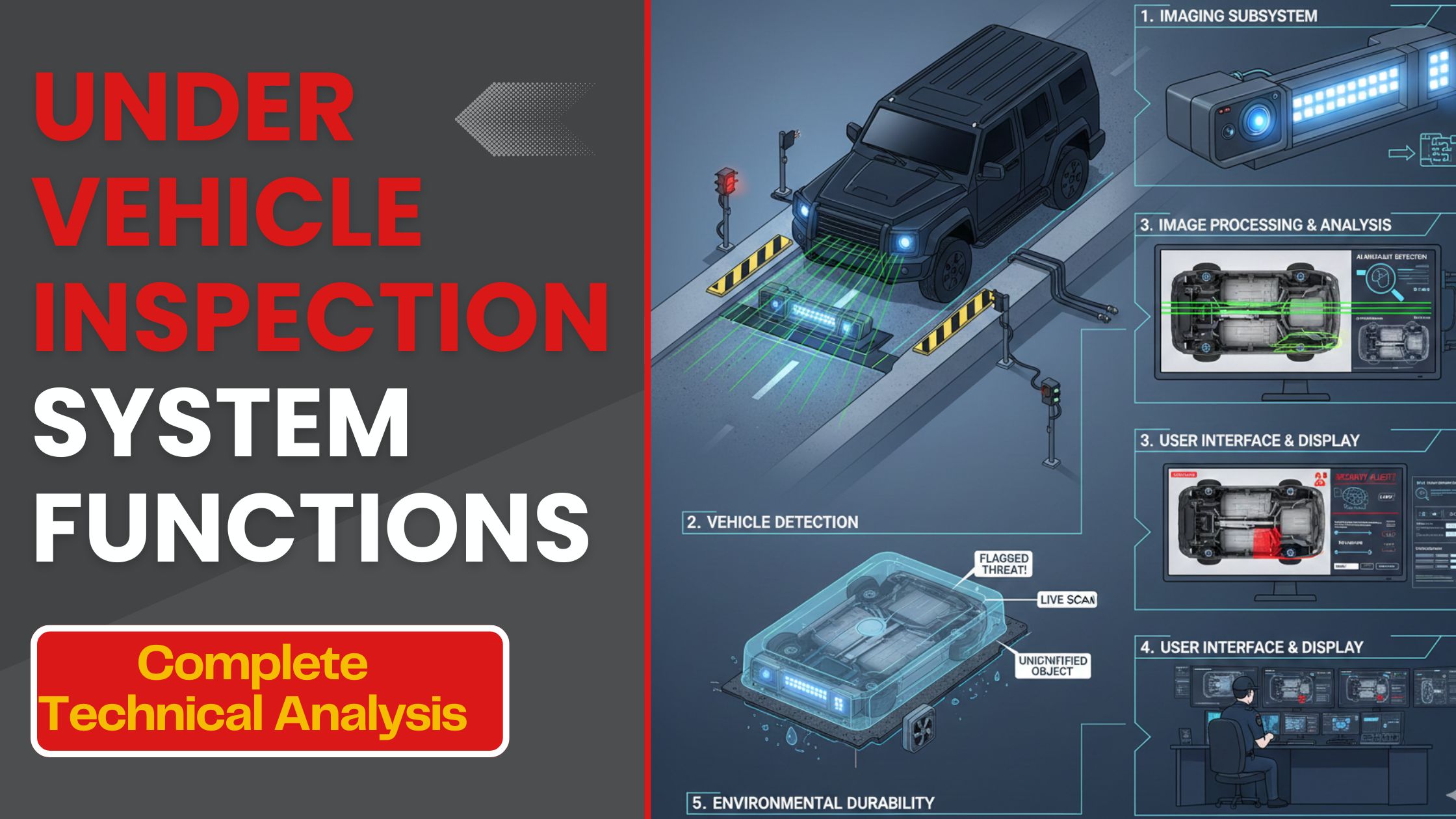
Security professionals depend on three things: speed, accuracy, and consistency. An Under Vehicle Inspection System is often referred to as a UVIS, that gives operators the ability to see the underside of a vehicle in real time. Under Vehicle Inspection Systems are often deployed at airports, embassies, ports, border crossings, data centers, government buildings, and anywhere an unapproved item or change to the structure of a vehicle could be a threat to the system.
In this blog, you will find a complete technical breakdown of what happens inside a Under Vehicle Inspection System, component by component, and how the overall system works together.
The underside of a vehicle has blind spots that cannot be thoroughly inspected by eye. The Under Vehicle Inspection System solves this by capturing a high-resolution image or video of the vehicle as it drives over the scanning unit. The UVIS then analyzes the image for anomalies such as:
The goal of the Under Vehicle Inspection System is simple: Identify anything that shouldn’t be there without slowing traffic.
It consists of:
The scanner unit must survive extreme heat, extreme cold, vibration, dust, oil, and the significant weight of heavy vehicles.
There are two imaging strategies adopted by UVIS manufacturers. Line Scan Cameras Line scan cameras record a long continuous strip of an image in real time. And the area scan cameras record short bursts of full frames.
Uniformity in lighting is an important aspect of the imaging systems. LED arrays fire at predetermined angles to eliminate shadows and increase contrast. Lighting will be automatically adjusted based on vehicle speed and ambient light.
The cameras are triggered the moment a vehicle enters the scanning zone by infrared sensors or magnetic sensors installed in the road. The speed of the vehicle is used to help provide the software with information about frame timing. This also helps reduce motion blur.
Edge processing is a common practice at secure checkpoints so the teams prepare themselves to avoid any dependency to cloud connectivity.
Security personnel get an image on the monitor in a live view. They can zoom, compare, flag anomalous areas, and document and save evidence. Some systems have a function to automatically alert that focus on suspicious areas on the image.
Here is the comprehensive workflow from the moment a vehicle arrives.
The sensors detect the vehicle and speed, which also wakes up the cameras and lights.
The intensity of the LED arrays is synchronized so that the reflectivity from metal surfaces does not wash the detail out.
Depending on the entire system, the UVIS takes a 1000s of line scans or takes 10s or dozen of high resolution frames as the vehicle is still moving. Timing is very critical because if the two (2) devices are even slightly out of sync this will cause a distorted stitch.
The software builds the “slices” that were captured into one continuous underside image of the vehicle. Some of the corrections that were applied include:
The end result resembles an accurate top down scan of the entire vehicle undercarriage.
Numerous UVIS systems utilize AI or rule based analysis. The system is verifying for:
The staff member examines the live composite image; zooms in on key areas; looks at the previous scans; and clears the vehicle, or turns over for a more thorough inspection
Images, timestamps, alerts and operator notes are logged. This accomplishes traceability, supports audits, and supports improvements to the threat detection models.
Manual inspections take time and depend on the skill of the inspector.
We expect upgrades in three areas:






